
Merakit Famosa Studio Robotik Kit – Part 3
Setelah pada bagian kedua kita telah memasang Arduino Uno/Leonardo, kabel-kabel power, motor shield, micro servo dan dudukan Sensor Jarak dari Famosa Studio Robotik Kit (FSRB), bagian ketiga atau bagian terakhir ini akan melanjutkan proses merakit sampai FSRB bisa beroperasi.
9. Memasang Sensor Ultrasonic HC-SR04
- Komponen yang dibutuhkan: sensor Ultrasonic HC-SR04

Sensor Jarak siap dipasang
- Lepaskan dulu dudukan Sensor Jarak dari atas micro servo. Kemudian pasang Ultrasonic HC-SR04 pada dudukannya dengan menggunakan double-tape yang sudah disediakan.

Sensor Jarak terpasang pada dudukannya
- Pasang kembali dudukan tersebut di atas micro servo.

Sensor dan dudukannya terpasang di atas micro servo
10. Menghubungkan Micro Servo dan Sensor dengan Arduino Uno/Leonardo
- Komponen yang dibutuhkan: 7 buah kabel jumper

Kabel jumper untuk menghubungkan micro servo dan sensor
- Konektor micro servo mempunyai 3 kabel, kabel hitam untuk GND (ground), kabel merah untuk tegangan masuk (4,5V – 6 V) dan kabel putih merupakan sinyal yang menentukan posisi servo (dari 0 – 180 derajat).
- Gunakan kabel jumper untuk menghubungkan micro servo dengan Arduino Uno/Leonardo, kabel jumper yang terpasang header 2 pin, dihubungkan dengan header VIN (PWR IN) dan GND (PWR IN) di motor shield. Ujung jumper-nya dihubungkan ke Servo, VIN terhubung dengan kabel Servo merah, GND terhubung dengan kabel Servo hitam. Kabel Servo putih dipasang pada pin digital 10 Arduino Uno/Leonardo.

Koneksi micro servo dengan Arduino Uno/Leonardo dan motor shield
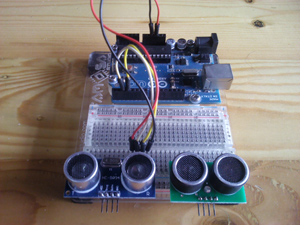
- Konektor sensor Ultrasonic HC-SR04 mempunyai 4 pin, yaitu VCC, TRIG, ECHO dan GND. Kabel jumper yang disediakan sudah dilengkapi dengan header yang siap untuk dihubungkan dengan 4 pin pada sensor HC-SR04 tersebut. Perhatikan warna kabel pada masing-masing posisi yang terhubung dengan pin di sensor HC-SR04.
- Gunakan kabel jumper untuk menghubungkan sensor dengan Arduino Uno/Leonardo, kabel pada pin VCC di sensor HC-SR04 dipasangkan pada header +5V (PWR OUT) di motor shield, kabel pada pin GND di sensor HC-SR04 dipasang pada header GND (PWR OUT) di motor shield, kabel pada pin TRIG di sensor HC-SR04 dipasang pada pin digital 2 di Arduino Uno/Leonardo dan kabel pada pin ECHO di sensor HC-SR04 dipasang pada pin digital 3 di Arduino Uno/Leonardo.

Koneksi sensor dengan Arduino Uno/Leonardo dan motor shield
11. Menentukan Posisi Tengah (Center) dari Micro Servo
- Kita perlu mengetahui posisi tengah dari micro servo, agar pergerakannya bisa seimbang antara ke kanan dan ke kiri.
- Pin digital 10 pada Arduino Uno/Leonardo sudah diprogram untuk menempatkan micro servo pada posisi tengah.
- Tempelkan battery holder pada FSRB-04 dengan menggunakan double tape yang sudah disiapkan.

Battery holder terpasang di atas badan robot
- Pasang batere 9V pada klip batere, kemudian pasang juga 4 buah batere 1,5V atau 1,2V (rechargeable) pada battery holder.

Batere 9V dan 4 buah batere 1,2V terpasang pada battery holder
- Hidupkan robot dengan memasang switch pada posisi ON. Micro servo yang kabel sinyal-nya terpasang pada pin digital 10 akan bergerak pada posisi tengah (90 derajat). Bila posisi sensor Ultrasonic HC-SR04 belum pas menunjuk ke tengah, angkat dudukan sensor dari atas micro servo dan pasang kembali dengan sensor menghadap ke depan. Baut pada servo horn bisa dilonggarkan untuk menyesuaikan posisi dudukan sehingga tepat ditengah. Kencangkan kembali baut servo horn dan kencangkan servo pada dudukannya dengan menggunakan baut dari bagian atas.
- Setelah dipastikan micro servo berapa tepat ditengah, switch dapat dimatikan. Kemudian rubah kabel sinyal dari pin digital 10 ke pin digital 9. Pin digital 9 sudah diprogram untuk bergerak ke kanan dan ke kiri.
12. Merakit Roda Robot
- Komponen yang dibutuhkan: 4 buah roda robot FSRB-03, 2 buah o-ring, 2 buah servo horn berbentuk + beserta bautnya, 8 buah acrylic spacer, 8 pasang mur dan baut 16mm.

Komponen untuk merakit roda robot
- Untuk memasang servo horn pada FSRB-03 diperlukan 4 buah baut putih.

Servo horn siap dipasang pada FSRB-03
- Pasang servo horn menggunakan 4 buah baut putih seperti berikut.

Servo horn terpasang pada FSRB-03 - tampak atas

Servo horn terpasang pada FSRB-03 - tampak bawah
- Untuk menggabungkan 2 buah FSRB-03, diperlukan 4 buah acrylic spacer dan 4 pasang mur dan baut 16mm.

Komponen untuk menggabungkan 2 buah FSRB-03
- Pasang 4 buah baut pada FSRB-03 (yang tanpa servo horn), kemudian pasangkan 4 buah acrylic spacer (spacer ini nantinya akan berada di antara 2 buah FSRB-03), sehingga tampilannya menjadi seperti gambar berikut.

Memasang 4 buah acrylic spacer pada baut
- Pasang FSRB-03 yang dengan servo horn di atas FSRB-03 yang tanpa servo horn. Pasang 4 buah mur dan kencangkan. Seperti gambar berikut.

2 buah FSRB-03 terpasang dengan acrylic spacer sebagai pemisahnya
- Jadi sebenarnya kita seperti membuat ‘sandwich’ 3 lapis, FRSB-03 (tanpa servo horn) — acrylic spacer — FSRB-03 (dengan servo horn). ‘Lapisan’ tersebut kemudian dikunci dengan 4 pasang mur dan baut 16mm.
- Ulangi lagi ‘sandwich’ 3 lapis tersebut untuk pasangan FSRB-03 yang satu lagi, sehingga kita mempunya 2 buah roda FSRB-03 seperti pada gambar berikut.

2 buah roda FSRB-03, tampak atas (sebelah kanan) dan tampak bawah (sebelah kiri)
- Celah yang terdapat di antara FSRB-03 tersebut kita gunakan untuk memasang karet o-ring yang akan berfungsi sebagai ban dari roda robot kita. Seperti gambar berikut.

Roda robot dipasang karet o-ring sebagai ban

2 buah roda robot dengan karet o-ring sebagai ban-nya
13. Memasang Roda Robot
- 2 buah roda robot kita pasang pada dudukan servo horn yang ada pada standard servo. Seperti gambar berikut.

2 buah roda robot dipasang pada standard servo kanan dan kiri
- Gunakan baut berwarna hitam dari aksesoris standard servo untuk mengencangkan servo horn pada dudukannya. Lakukan untuk roda sebelah kanan dan kiri.

Gunakan baut untuk mengencangkan servo horn melalui lubang di tengah roda - roda kanan

Lakukan hal yang sama untuk roda sebelah kiri
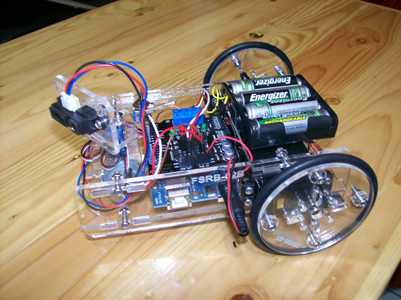
14. FSRB Siap Dioperasikan!
- Bila tidak ada kesalahan dalam mengikuti tahapan merakit kit robotik ini, maka robot anda sudah dapat berjalan dan menghindari rintangan yang ditemuinya 🙂

Tampak depan FSRB

Tampak atas FSRB

Masang Batre nya gimana mas ??
masang batre nya gmana mas ??
cara masang batre ke robotnya gmana ??
Mas Dani, silahkan cek ke Part 2, dibagian komentar sudah saya gambarkan skema untuk baterenya. Output 9V untuk Arduino, sedangkan output 6V untuk motornya.
Ini link-nya: https://test.famosastudio.com/2011/07/bengkel/merakit-famosa-studio-robotik-kit-part-2/227
pak mau tnya, fungsi 1A tsb d atas apa ya pak yang di atasnya arduino,jika memakai arduino saja apa tidak bisa?? saya mau bikin robot ky d atas, trus mau saya remote pake hp android dgan bluetooth rncangannya kira2 sperti apa y pak dan bahan2nya apa sja? mhon d bls di email, atau nomer hp 0858XXXXXX sgat berterima kasih jika bpak mau sharing ilmu… terima kasih sbelumnya pak.
Untuk menggerakkan motor DC, board Arduino itu perlu yang namanya Motor Shield. Motor shield yang saya pakai di FSRB itu yang bisa menggerakkan motor DC dengan arus maksimum 1A. Motor shield diperlukan karena board Arduino tidak punya kemampuan untuk menyediakan arus yang besar agar bisa menggerakkan motor. Pin digital Arduino itu hanya bisa menyediakan arus maksimum 40mA.
Silahkan pelajari FSRB dan kemudian dicoba membuatnya. Nanti setelah bisa, silahkan digabungkan dengan Bluetooth Shield kalau mau menggerakkanya secara remote lewat HP Android. Tutorial menggunakan Bluetooth Shield sudah ada di post yang ini.
selat siang om, oh iya mau tnya sy rencana mau buat robot nih yg kya gni?? tp sourcode nya gmn om?? kok d atas g di sertain settingan .ino / sourcodenya??? terima kasih, mohon d bls email y om?? sy minat sekali soalnya,,, terima ksih
Program yang digunakan di FSRB ini sudah saya sampaikan di post yang ini. Di contoh program itu sudah saya sertakan beberapa penjelasan tentang pin-pin yang dipakai, silahkan dipelajari.
Kode program Arduio itu text file, jadi tidak perlu file .ino, cukup copy paste contoh program yang ada ke Software Arduino.
ane mau nanya master,,tipe arduino uno itu bisa untuk menjalankan servo berapa biji ya..?