Merakit Famosa Studio Robotik Kit – Part 2
Setelah pada bagian pertama kita berhasil merakit badan robotik dari Famosa Studio Robotik Kit, kita akan lanjutkan lagi proses merakitnya di bagian kedua ini.
4. Memasang Arduino Uno/Leonardo
- Kita akan memasang board Arduino Uno/Arduino Leonardo pada badan robot, komponen yang dibutuhkan: badan robot, Arduino Uno/Leonardo, 4 buah baut 6mm.

Arduino Uno/Leonardo siap dipasang
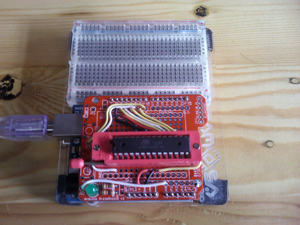
- Letakkan Arduino Uno/Leonardo di atas nylon screw, sesuaikan posisi lubangnya. Kemudian pasang baut-nya. Pasang baut satu per satu, kemudian dikencangkan setelah 4 baut-nya terpasang. Jack DC dan port USB akan dapat diakses dari sisi kiri. Hasilnya seperti gambar berikut.

Arduino Uno/Leonardo terpasang pada badan robot
- Pemasangan baut dapat dilihat secara detil pada gambar berikut.

Pemasangan baut pada Arduino Uno/Leonardo
5. Memasang DC Power Jack, Switch dan Battery Holder
- Komponen yang dibutuhkan: 1 set DC Power Jack + Switch + Battery Holder

DC Power Jack + Switch + Battery Holder siap dipasang
- Pasang switch pada lubang yang sudah disiapkan (lubang dengan tulisan OFF dan ON disebelah kanan depan). Lepaskan mur dan ring dari switch, kemudian masukkan switch dari bawah. Pada ring terdapat bagian yang menonjol ke bawah, posisikan bagian yang menonjol ini pada lubang berbentuk kotak dekat tulisan OFF. Pasang mur dan kencangkan menggunakan tang. Hasilnya seperti berikut.

Posisi switch setelah terpasang
- Pasang DC power jack pada Arduino Uno/Leonardo. Kemudian atur posisi klip battere 9V di antara standard servo. Kabel yang menggunakan header 2 pin nanti akan dipergunakan untuk VIN dan GND pada Motor Shield. Lihat di gambar berikut.

Pemasangan DC power jack, klip batere 9V, kabel VIN dan GND
6. Memasang Motor Shield 1A
- Komponen yang dibutuhkan: Motor Shield 1A

Motor Shield 1A siap dipasang
- Berbeda dengan Motor Shield 1A standard, yang ini sudah ditambahkan header untuk memudahkan pemasangan kabel jumper.
- Sebelum memasang motor shield di atas board Arduino Uno/Leonardo, kita akan memasangkan kabel standard servo ke terminal M1 dan M2 pada motor shield. Terminal M1 (M1- dan M1+) dipergunakan untuk standard servo bagian kanan, sedangkan terminal M2 (M2+ dan M2-) untuk standard servo bagian kiri.
- Posisikan kabel-kabel standard servo mendekati posisi terminal pada motor shield, seperti pada gambar berikut.

Posisikan kabel standard servo mendekati posisi terminal motor shield
- Dari 3 kabel pada standard servo (oranye, merah dan coklat/putih, merah dan hitam) hanya 2 yang dipergunakan, yaitu kabel merah dan coklat/hitam.
- Pasang kabel standard servo bagian kanan pada terminal dengan penempatan seperti ini: kabel merah pada M1- dan kabel coklat/hitam pada M1+. Lalu kencangkan baut pada terminal. Hasilnya seperti pada gambar berikut.

Penempatan kabel dari standard servo bagian kanan
- Dilanjutkan dengan pemasangan kabel servo bagian kiri dengan penempatan seperti berikut: kabel merah pada M2+ dan kabel coklat/hitam pada M2-. Kencangkan baut pada terminal tersebut. Penempatan yang benar akan menghasilkan tampilan seperti ini.

Penempatan kabel standard servo pada terminal
- Setelah penempatan kabel servo, kita baru bisa memasang motor shield di atas board Arduino Uno/Leonardo. Kehati-hatian diperlukan pada saat memasang motor shield ini, agar tidak ada kaki header dari motor shield yang bengkok. Motor shield yang berhasil dipasang akan terlihat seperti ini.

Motor shield terpasang di atas Arduino Uno/Leonardo
7. Memasang Micro Servo
- Komponen yang dibutuhkan: Micro Servo beserta aksesorisnya, 2 pasang mur dan baut 10mm.

Micro servo beserta aksesorisnya siap dipasang
- Pasang baut 10mm pada karet dudukan servo. Kemudian tempatkan micro servo pada posisinya, yaitu pada lubang kotak yang ada di FSRB-05.

Pasang baut pada karet dudukan dan penempatan micro servo
- Baut dengan karet dudukan tadi dipasangkan pada lubang servo (kanan dan kiri) lalu dikencangkan mur-nya. Hasilnya seperti berikut.

Micro servo terpasang pada badan robot
8. Memasang dudukan sensor jarak Sharp GP2D12/Ultrasonic HC-SR04
- Komponen yang dibutukan: dudukan (holder) Sensor Jarak, 1 pasang mur & baut 10mm, 2 buah acrylic spacer, servo horn berbentuk +, 2 baut putih dan 1 baut hitam.

Komponen holder Sensor Jarak, 1 pasang mur & baut 10mm, dll
- Rakit dudukan Sensor Jarak dengan memasukkan bagian yang menonjol pada lubang yang ada pada acrylic dengan tulisan Sharp GP2D12. Seperti gambar berikut

Memasang dudukan Sensor Jarak
- Pasang baut dan mur-nya, lalu dikencangkan.

Dudukan Sensor Jarak dengan baut dan mur terpasang
- Pasang servo horn pada dudukan Sensor Jarak dengan baut putih dengan terlebih dahulu dilapisi acrylic spacer. Seperti gambar berikut.

Memasang servo horn pada dudukan Sensor Jarak
- Pasang baut kedua pada servo horn. Menjadi seperti berikut.

Servo horn terpasang pada dudukan Sensor Jarak
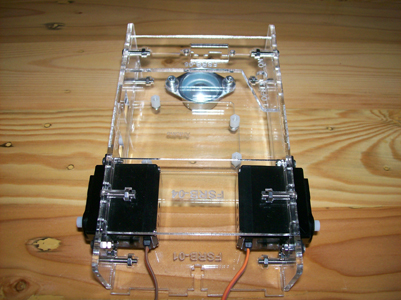
- Dudukan Sensor Jarak yang sudah kita rakit tersebut sudah bisa dipasangkan di atas micro servo. Posisikan servo horn pada kepala dari servo. Servo horn tidak perlu dikencangkan dulu dengan baut karena kita belum menetapkan posisi tengah (center) dari micro servo tersebut.

Dudukan Sensor Jarak terpasang di atas micro servo - tampak depan

Tampak samping dari dudukan Sensor Jarak
Itu adalah bagian kedua dari cara merakit Famosa Studio Robotik Kit. Untuk melihat bagian ketiga silahkan klik di sini.

Permisi Pak..
Mau nanya nih, untuk power battery 9V dan 4 x 1,5V ada contoh gambar rangkainan gak pak?
Thank’s
Ini contoh rangkaian batere-nya: